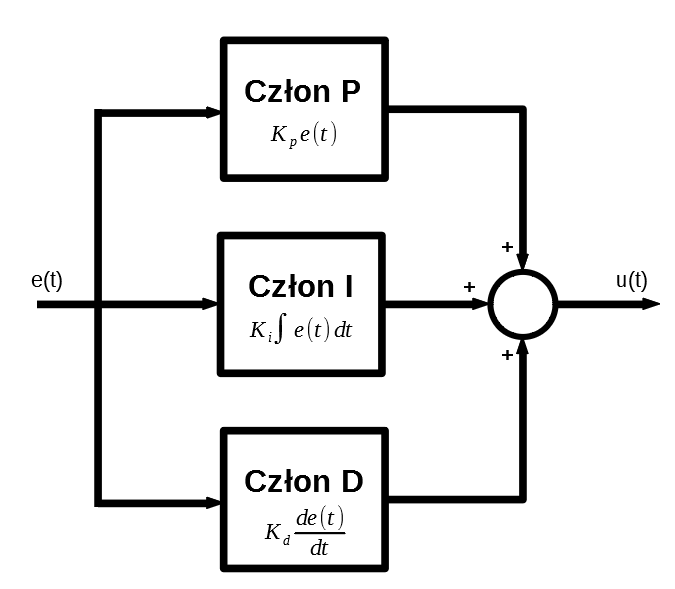
Regulator PID zakłada że świat zewnętrzny jest liniowy, co oczywiście jest kłamstwem. Nasze urządzenia wykonawcze, takie jak grzałka, czy silnik mają pewną ograniczona moc, czyli charakteryzują się nasyceniem. Oznacza to że nie możemy uruchomić naszej grzałki na 120% mocy, natomiast regulator PID będzie tego oczekiwał. Zestawienie członu całkującego z regulatora PID oraz nasycenia może skutkować pojawieniem się zjawiska określanego jako windup całkowania. Wyobraźmy sobie sytuację kiedy chcemy w systemie regulacji temperaturą uzyskać wartość 100 stopni Celsjusza, kiedy temperatura obecna wynosi 20 stopni. Regulator PID uruchamia grzałkę na 100% mocy, jednak jej moc jest ograniczona, przez co uchyb będzie redukowany wolniej niż oczekuje tego regulator. W tym czasie wartość całki może osiągnąć olbrzymie wartości. Nawet kiedy osiągniemy zadaną temperaturę, wartość całki zacznie maleć dopiero wtedy kiedy temperatura będzie większa od zadanej. Może pojawić się ogromne przesterowanie i wydłuży się czas stabilizacji. Jest wiele metod przeciwdziałania temu zjawisku, najprostszym sposobem jest ograniczenie wartości całki do skończonych wartości.