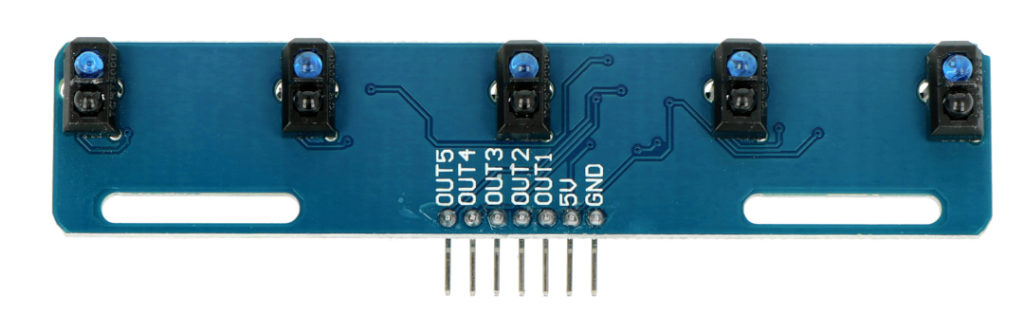
Niezbędnym elementem naszego Line Followera jest płytka z czujnikami obiciowymi. To one pozwalają nam wykryć czarną linię na jasnym tle. Wykorzystałem tutaj moduł TCRT5000L. Moduł ten wyposażony jest w pięć czujników odbiciowych. Według ich specyfikacji wykrywają one czarną linię z odległości od 0 do 4 cm. W rzeczywistości jednak należy tą odległość dobrać do warunków, czyli do koloru linii którą wykorzystujemy i koloru tła. W moim projekcie moduł z czujnikami zamontowany jest 1,5 cm od podłoża. Wysokość zamontowania modułu najlepiej dobrać eksperymentalnie. Należy nakleić na podłodze czarną taśmę, następnie podłączyć zasilanie do modułu, potem zbliżać moduł i oddalać do linii i obserwować statusowe diody LED na module. Tylko statusowa dioda LED czujnika który jest nad linią powinna zgasnąć, jeśli uzyskamy taki efekt, wysokość na której wówczas był moduł jest tą którą powinniśmy zastosować. Moduł należy zasilić napięciem od 3,3 do 5,5 V.