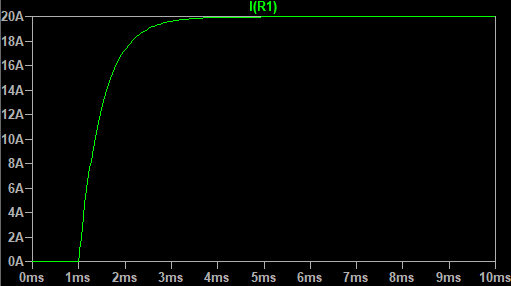
Po podłączeniu uzwojenia wirnika do napięcia stałego płynie przez nie stały prąd. Wynikałoby z tego, że silnik wciąż by przyspieszał. W praktyce silniki prądu stałego tak się jednak nie zachowują.
Zaraz po podłączeniu napięcia zasilania przez uzwojenie płynie bardzo duży prąd, który później maleje, a silnik przestaje przyspieszać.
Za ten efekt odpowiedzialna jest tzw. wsteczna siła elektromotoryczna. Na czym to polega?
Z prawa Faradaya wynika, że jeżeli pętla z prądem znajduje się w zmiennym polu magnetycznym to pojawi się w niej siła elektromotoryczna, która zachowuje się tak jak dodatkowe dołączone do tej pętli źródło napięcia. Siła te będzie proporcjonalna do szybkości zmian strumienia pola magnetycznego przechodzącego przez pętlę.
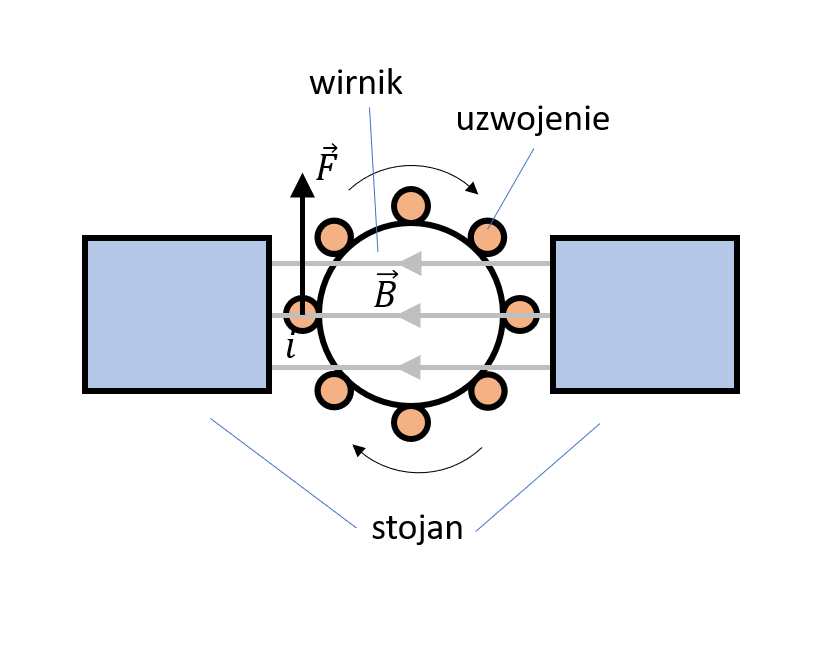
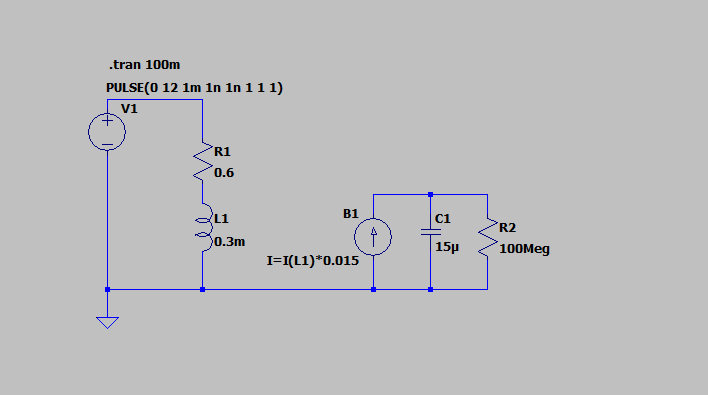
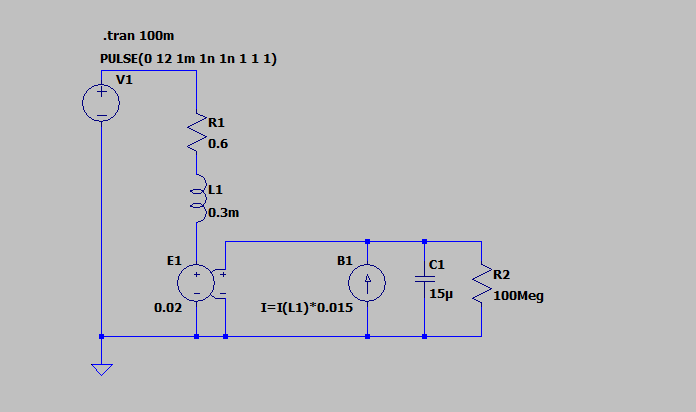
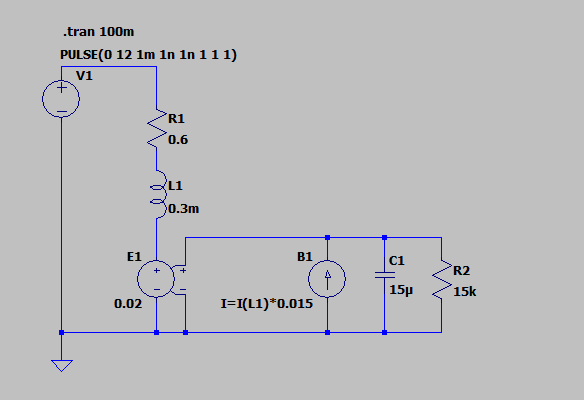
Ponieważ wirnik silnika to tak właściwie dużo takich pętli umieszczonych w polu magnetycznym, to gdy wirnik zacznie się poruszać, pojawi się na nim siła elektromotoryczna. W związku z tym możemy zamodelować taki wirnik jako trzy połączone szeregowo elementy:
- Rezystor modelujący rezystancję wirnika.
- Cewkę indukcyjną (wirnik wytwarza też własne pole magnetyczne).
- Źródło napięcia, które modeluje właśnie siłę elektromotoryczną.
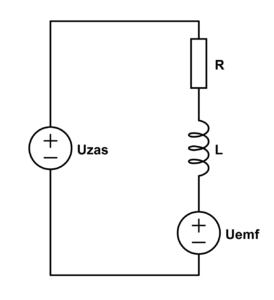
Taki model silnika jest pokazany na rys. 2. Zwróć uwagę zwłaszcza na kierunek dodatkowego źródła napięcia. Jest ono skierowane tak, że przeciwdziała napięciu zasilania.
Co z tego wynika? Na początek zapiszmy równanie mówiące, że siła elektromotoryczna jest proporcjonalna do prędkości wirnika (im szybciej obraca się silnik tym będzie większa):
$$U_{EMF} = k_2 \omega,$$
gdzie $k_2$ to kolejny charakterystyczny parametr silnika mierzony w $V/rad/s$ (woltach na radian na sekundę).
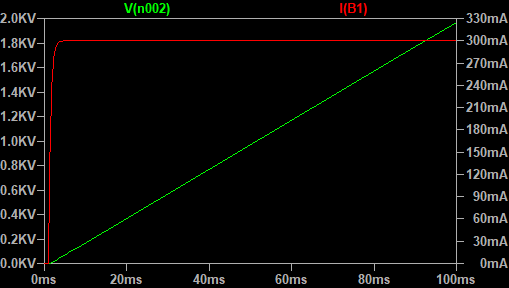
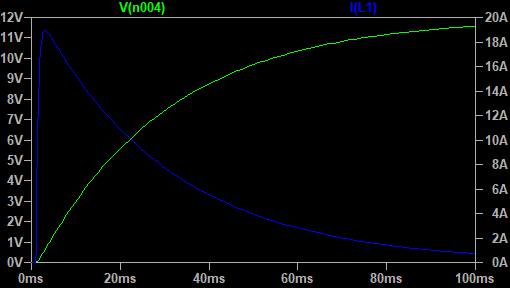
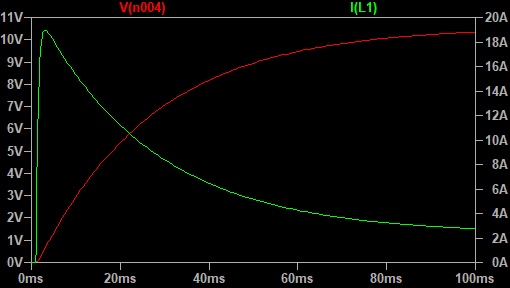
Im szybciej obraca się wirnik tym mniejszy będzie płynął przez niego prąd ponieważ wsteczna siła elektromotoryczna „wygasza” napięcie zasilania.
W pewnym momencie siła elektromotoryczna będzie równa napięciu zasilania. Wtedy przez wirnik przestanie płynąć prąd i moment obrotowy też całkowicie zniknie.


2 komentarze do “Symulacja silnika prądu stałego w SPICE”
Pingback: Dioda zabezpieczająca. Przekaźniki dla początkujących cz. 3 - InterTech Academy
Pingback: Dodajemy potencjometr do LTSpice - InterTech Academy