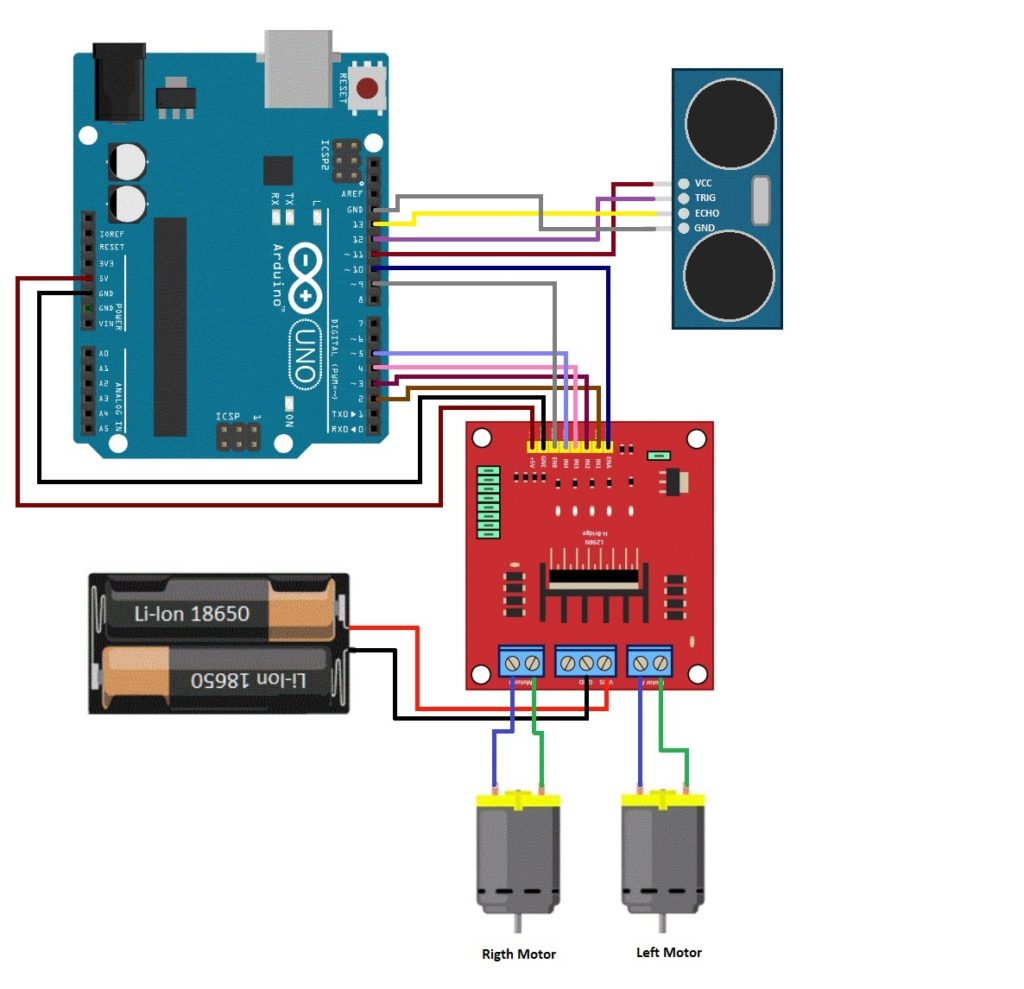
Czujnik HC-SR04 posiada cztery piny, do dwóch z nich podłączamy zasilanie, natomiast pozostałe dwa czyli „Trig” i „Echo” wykorzystujemy do pomiaru odległości. Na wejście „Trig” wysyłamy sygnał o długości 10 µs i mierzymy czas do pojawienia się sygnału na wyjściu „Echo”. Tak zmierzony czas możemy przeliczyć na odległość od przeszkody w następujący sposób: s=V/t, znamy czas t [µs] oraz prędkość dźwięku w powietrzu która wynosi 340,3 [m/s] czyli 0,03403 [cm/µs]. Sygnał ultradźwiękowy pokonuje drogę do przeszkody dwukrotnie, raz z nadajnika do przeszkody, następnie od przeszkody do odbiornika. Także musimy nasz wynik podzielić przez 2 : s=V/2t. W przybiżeniu wychodzi że aby obliczyć odległość od przeszkody wystarcz podzielić zmierzony czas przez 58, czyli s=t/58. Uzyskujemy wtedy wynik odległości w centymetrach.



One thought on “Zbuduj własnego robota – Robot śledzący ścianę”
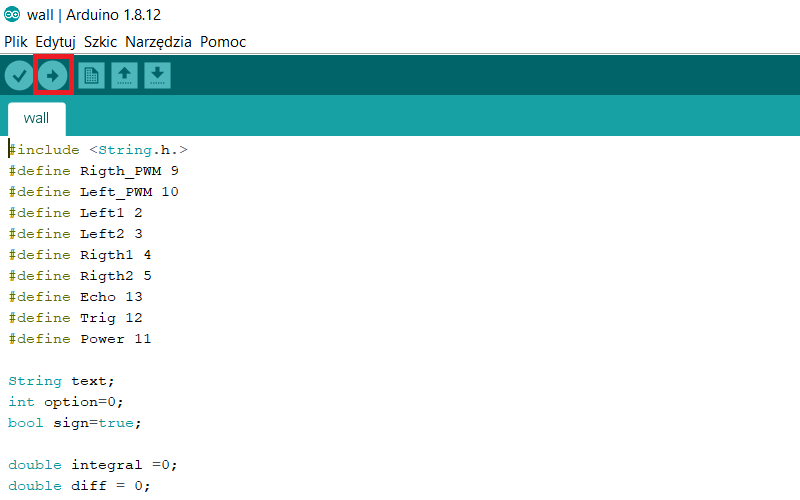
Czy można u Was zakupić wszystkie niezbędne komponenty? No i gdzie jest kod?